Robot eller güçlüdür, hızlıdır, yorulmaz ama uzun süredir kontrolsüz bir güç olarak kalmaya mahkûmdular; parmakların tam olarak nerede olduğunu, hangi açıda büküldüğünü gerçek zamanlı olarak “hissedemiyorlardı.” Çin’deki bir araştırma grubu, bu kontrolsüzlüğü gidermek için insan elinin kendi biyolojisinden ilham alan bir sensör geliştirdi. Sonuç, insansı robotların geleceğini kökten değiştirebilecek nitelikte.
Sorun: Robot Eller Neden “Kontrolsüz” Hareket Eder?
İnsan eli, bir nesneye dokunmadan bile parmakların tam olarak nerede olduğunu hissedebilir. Buna propriosepsiyon (öz algı) denir. Kas, tendon ve eklemlerdeki reseptörler beyne sürekli konum bilgisi iletir. Robotlarda bu yetenek son derece kısıtlıdır. Özellikle çok eksenli hareketlerde; bir parmağın hem öne-arkaya (pitch) hem de yana (yaw) eğilmesi gerektiğinde mevcut sensörler, bu iki hareketi birbirinden ayırt edemez ve sinyaller birbirine karışır. Bu durum, robotların ince ve hassas işleri yerine getirememesinin temel nedenlerinden biridir.
Işıkla Duyan Parmaklar
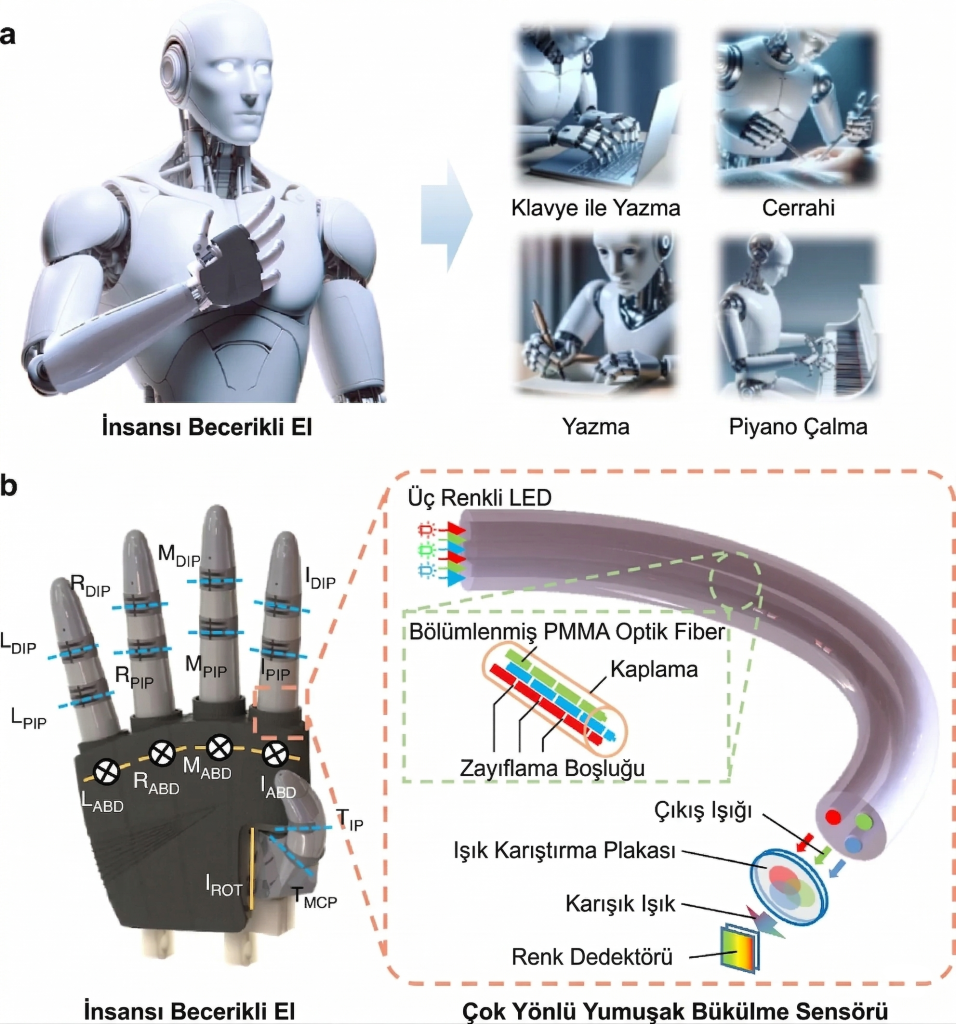
Zhejiang Üniversitesi, Hangzhou Dianzi Üniversitesi ve Lishui Üniversitesi iş birliğiyle geliştirilen bu sistemin temelini, her robot parmağının eklemine yerleştirilen çok yönlü yumuşak bükülme sensörü oluşturuyor. Sensör, PMMA (polimetilmetakrilat) adlı şeffaf bir malzemeden yapılmış bölümlü optik fiberlardan oluşuyor. Sisteme entegre üç renkli bir LED (kırmızı, yeşil ve mavi) bu fiberlara ışık gönderiyor. Parmak büküldüğünde her renk kanalından geçen ışığın şiddeti farklı oranlarda azalıyor; bu farklılık sayesinde sistem hem dikey eğilmeyi hem de yanal sapmayı ayrı ayrı tanımlayabiliyor.

Tıpkı insan gözünün farklı dalga boylarını ayrıştırarak renkleri görmesi gibi, sensör de farklı ışık kanallarını kullanarak iki hareket türünü “görüyor.” Basit ama etkili bir yöntem…
El Tasarımı: 18 Serbestlik Derecesi
Geliştirilen insansı el 18 aktif serbestlik derecesine ve beş rijit-esnek yapılı parmağa sahip. Her parmağın metakarpofalangeal eklemi iki serbestlik derecesine sahip; böylece parmaklar içe-dışa ve öne-arkaya hareketlerini hem bağımsız hem de koordineli bir şekilde gerçekleştirebiliyor.
Tasarımın en can alıcı noktası, rijit-esnek hibrit yapısı. Tamamen sert sistemler kırılgan ve ağır olurken, tamamen yumuşak sistemler hassas kontrolü zorlaştırıyor. Bu hibrit yaklaşım her iki yöntemin güçlü yanlarını tek çatı altında birleştiriyor: sertlik gerektiren noktalarda rijit parçalar, esneklik gerektiren yerlerde ise yumuşak bileşenler kullanılıyor.
Hassasiyet Çıtası Çok Yüksek
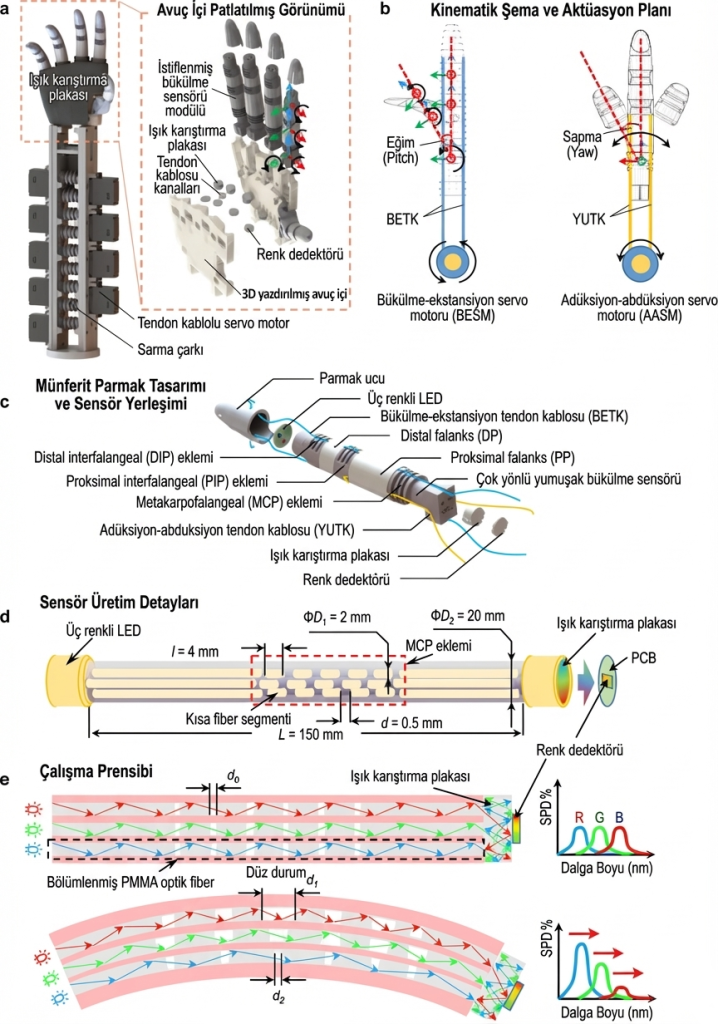
100 döngü boyunca test edilen sensörde üç optik kanal için ortalama karesel sapma değerleri sırasıyla %2,1, %1,9 ve %3,2 olarak ölçüldü. Tek eksenli bükülme koşullarında ortalama hata; dikey hareket için yalnızca ±2,13°, yanal hareket için ise ±2,34° seviyesinde kaldı.
Sistemin en belirleyici başarısı, dikey ve yanal sinyalleri ne kadar temiz biçimde ayırt edebildiği. Sinyal-Girişim Oranı (SCR); yanal sapmada 50,68 dB, dikey eğilmede ise 30,81 dB olarak ölçüldü. Bu değerler, iki hareket türünün birbirine neredeyse hiç karışmadığını gösteriyor; robot el kontrolü açısından son derece önemli bir kazanım.
Piyano Çalan, Makas Kullanan Robot
Sistem; makas kullanmak, bilgisayar faresi hareket ettirmek ve piyano çalmak gibi ince motor becerisi gerektiren görevlerde yüksek kontrol ve kararlılıkla performans gösterdi. Bu görevlerin seçilmesi tesadüf değil; hepsi farklı açılardan zorlu. Makas hem kuvvet hem koordinasyon gerektiriyor, fare hareketi hassas ve küçük yer değiştirmeler talep ediyor, piyano ise her parmağın bağımsız ve ritmik kontrolünü zorunlu kılıyor. Teknoloji bu üç ayrı zorluğun üstesinden de başarıyla geldi.
Neden Bu Kadar Önemli?
Endüstriyel otomasyon alanındaki mevcut robot kollar büyük ve tekrarlayan görevlerde etkileyici sonuçlar verirken; montaj, cerrahi yardım veya bakım gibi ince beceri gerektiren alanlarda yetersiz kalıyor. Bu sensör tam da bu eksikliği giderecek nitelikte.
Protez el teknolojisi de bundan doğrudan yararlanabilir. Uzuv kaybı yaşayan bireylerin kullandığı protezler çoğunlukla basit kavrama hareketleriyle sınırlıdır. Parmak pozisyonunu gerçek zamanlı olarak algılayan bu yapı, protez ellere çok daha doğal bir hareket kabiliyeti kazandırabilir.
Rehabilitasyon alanında da yeni olanakların önü açılıyor. İnme geçirmiş ya da nörolojik hastalığı olan bireylerin el hareketlerini yüksek hassasiyetle izlemek ve çok daha etkili iyileşme programları hazırlamak mümkün hale geliyor.
İnsan Elinin Mirasçısı
Gözlerinizi kapattığınızda bile parmağınızın tam konumunu hissedersiniz. Bu his, kaslarınızdaki ve eklemlerinizdeki milyonlarca küçük reseptörün beyne gönderdiği sinyallerden doğar. Bu biyolojik beceriyi robot sistemlerine entegre etmek, mühendisler için uzun yıllar boyunca yanıtlanamayan bir soru işaretiydi. Optik fiber, üç renkli ışık ve hibrit malzeme tasarımının bir araya gelmesiyle bu soru işareti sonunda gideriliyor.
Robot eller artık kaba birer mekanizma olmaktan çıkıp gerçek birer “duyu organına” dönüşüyor. Bu gelişme, insansı robotların gündelik yaşamımıza dahil olması yolunda atılmış en devrimsel adımlardan biri olabilir.